20 Most Cited Papers In Robotics
Robotics is the branch of engineering that deals with the design, construction, operation, and use of robots, as well as computer systems for their control, sensory feedback, and information processing. Robots can be used to perform tasks that are dangerous, difficult, or repetitive for humans. The field of robotics is rapidly growing and has applications in many industries, including manufacturing, healthcare, agriculture, and defense. Naturally, there have been many papers published in the field. So it would be beneficial and interesting to know what the most cited papers in robotics are.
To come up with this list, we have used Google Scholar. In there we have done some extensive search and found the robotics most cited papers. Usually the more a paper is cited the more impact and importance it has. What we see in this blog post is a list of the 20 most cited papers in robotics. For each paper, we include its authors, number of citations, publication year and location, as well as a summary. We have also ploted the citation trend for each paper that shows if the paper popularity has grown or declined over time.
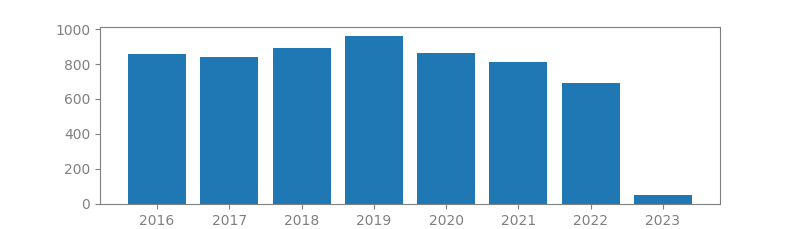
1. A ROBUST LAYERED CONTROL SYSTEM FOR A MOBILE ROBOT
Authors: Rodney Brooks
Published in: IEEE journal on robotics and automation, 1986
Number of citations: 12,985
Summary: A new architecture for controlling mobile robots is described. Layers of control system are built to let the robot operate at increasing levels of competence. Layers are made up of asynchronous modules that communicate over low-bandwidth channels. Each module is an instance of a fairly simple computational machine. Higher-level layers can subsume the roles of lower levels by suppressing their outputs. However, lower levels continue to function as higher levels are added. The result is a robust and flexible robot control system. The system has been used to control a mobile robot wandering around unconstrained laboratory areas and computer machine rooms. Eventually it is intended to control a robot that wanders the office areas of our laboratory, building maps of its surroundings using an onboard arm to perform simple tasks.
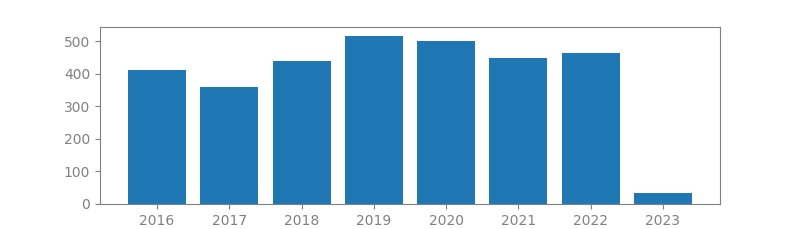
2. PROBABILISTIC ROBOTICS
Authors: Sebastian Thrun
Published in: Communications of the ACM, 2002
Number of citations: 12,779
Summary: This article offers an introduction to the vibrant field of probabilistic robotics. The key idea is a commitment to probability distribution as the basic representation of information. The related approaches provide sound solutions for the integration of inaccurate model information and noisy sensor data. Probabilistic robotics is a rapidly growing subfield of robotics because of its ability to accommodate the sensor noise and uncertainty that arises naturally in robotics. While many research challenges remain, it has already led to fundamentally more scalable solutions to many difficult problems, specifically in the area of mobile robotics. Moreover, it has led to deep mathematical insights into the structure of the problems and their solutions, while probabilistic techniques have proved their value in practice.
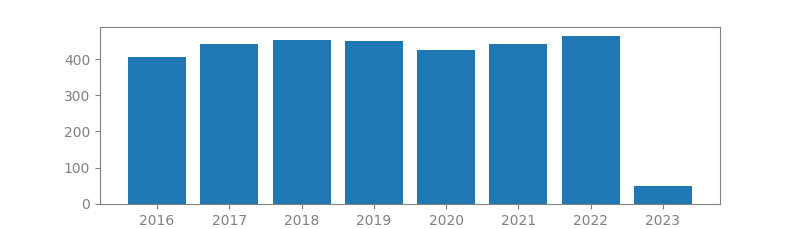
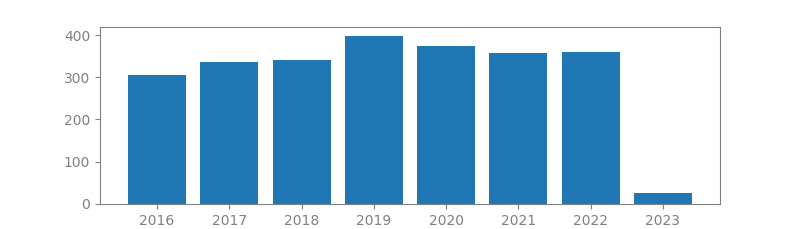
3. REAL-TIME OBSTACLE AVOIDANCE FOR MANIPULATORS AND MOBILE ROBOTS
Authors: Oussama Khatib
Published in: Autonomous robot vehicles, 1990
Number of citations: 9,191
Summary: This paper presents a unique real-time obstacle avoidance approach for manipulators and mobile robots based on the artificial potential field concept. Collision avoidance, traditionally considered a high level planning problem, can be effectively distributed between different levels of control, allowing real-time robot operations in a complex environment. This method has been extended to moving obstacles by using a time-varying artificial potential field. We have applied this obstacle avoidance scheme to robot arm mechanisms and have used a new approach to the general problem of real-time manipulator control. We reformulated the manipulator control problem as direct control of manipulator motion in operational space—the space in which the task is originally described—rather than as control of the task’s corresponding joint space motion obtained only after geometric and kinematic transformation…
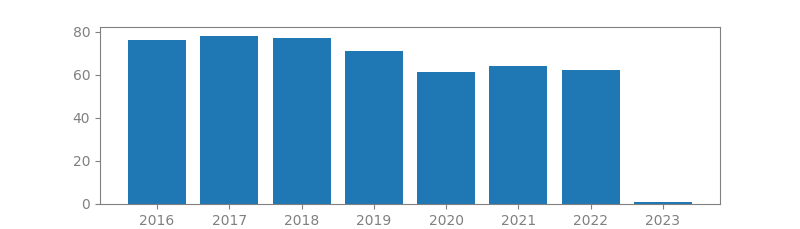
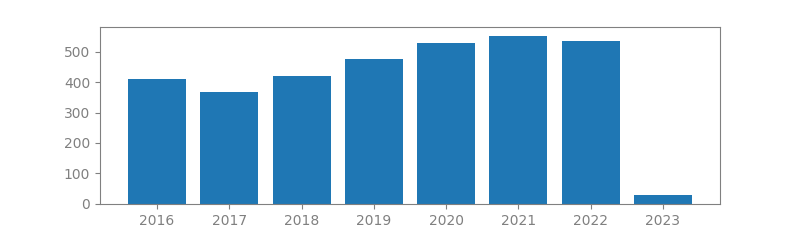
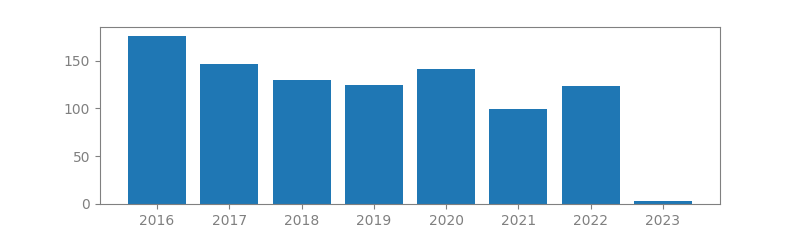
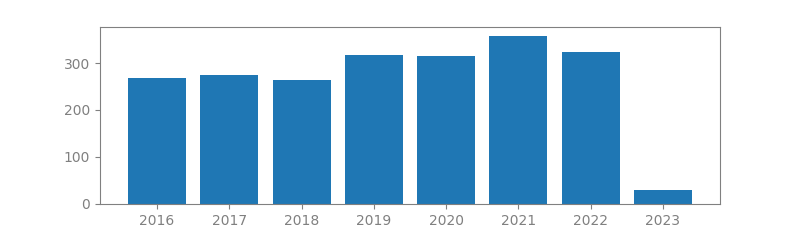
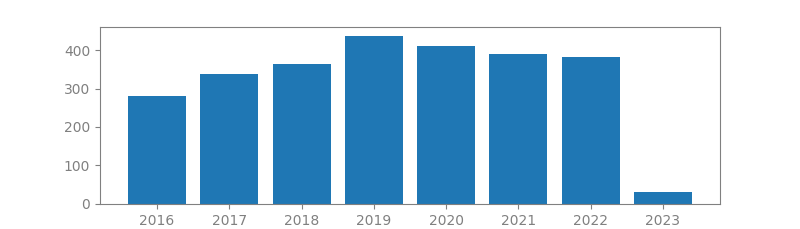
4. PROBABILISTIC ROADMAPS FOR PATH PLANNING IN HIGH-DIMENSIONAL CONFIGURATION SPACES
Authors: Lydia Kavraki, Petr Svestka, Jean Claude Latombe, Mark H Overmars
Published in: IEEE Transactions on Robotics and Automation, 1996
Number of citations: 6,970
Summary: A new motion planning method for robots in static workspaces is presented. This method proceeds in two phases: a learning phase and a query phase. In the learning phase, a probabilistic roadmap is constructed and stored as a graph whose nodes correspond to collision-free configurations and whose edges correspond to feasible paths between these configurations. These paths are computed using a simple and fast local planner. In the query phase, any given start and goal configurations of the robot are connected to two nodes of the roadmap; the roadmap is then searched for a path joining these two nodes. The method is general and easy to implement. It can be applied to virtually any type of holonomic robot. It requires selecting certain parameters (e.g., the duration of the learning phase) whose values depend on the scene, that is the robot and its workspace. But these values turn out to be relatively easy to…
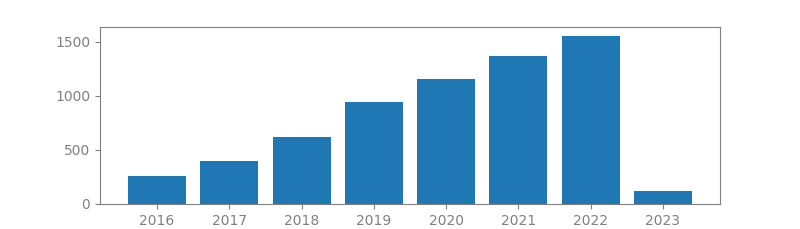
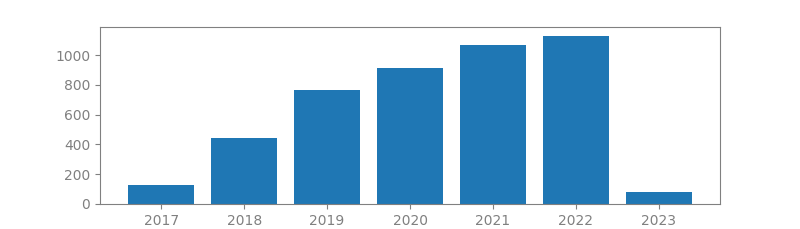
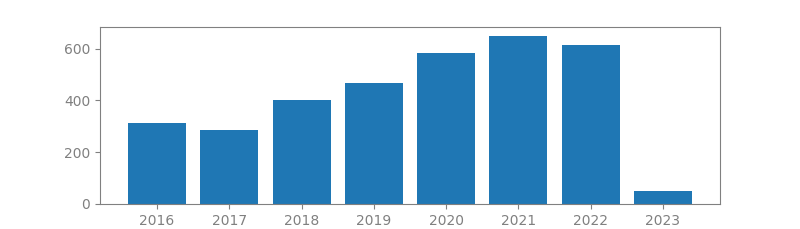
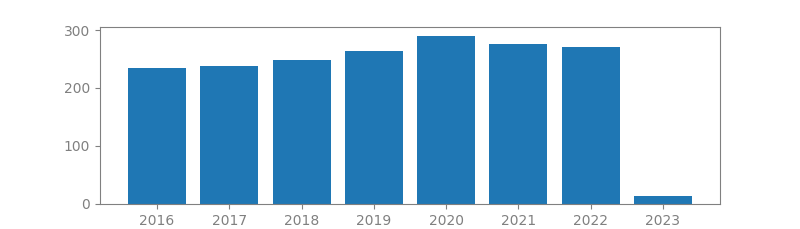
5. VISION MEETS ROBOTICS: THE KITTI DATASET
Authors: Andreas Geiger, Philip Lenz, Christoph Stiller, Raquel Urtasun
Published in: The International Journal of Robotics Research, 2013
Number of citations: 6,753
Summary: We present a novel dataset captured from a VW station wagon for use in mobile robotics and autonomous driving research. In total, we recorded 6 hours of traffic scenarios at 10-100 Hz using a variety of sensor modalities such as high-resolution color and grayscale stereo cameras, a Velodyne 3D laser scanner and a high-precision GPS/IMU inertial navigation system. The scenarios are diverse, capturing real-world traffic situations, and range from freeways over rural areas to inner-city scenes with many static and dynamic objects. Our data is calibrated, synchronized and timestamped, and we provide the rectified and raw image sequences. Our dataset also contains object labels in the form of 3D tracklets, and we provide online benchmarks for stereo, optical flow, object detection and other tasks. This paper describes our recording platform, the data format and the utilities that we provide.
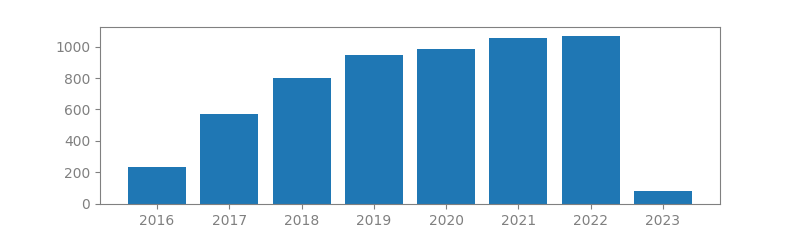
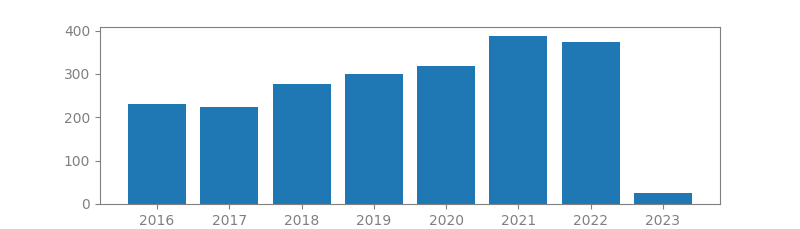
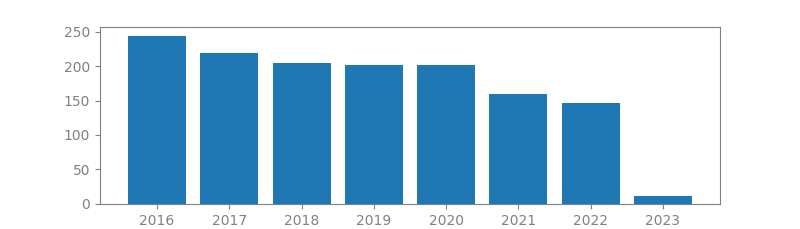
6. ORB-SLAM: A VERSATILE AND ACCURATE MONOCULAR SLAM SYSTEM
Authors: Raul Mur-Artal, JMM Montiel, Juan D Tardos
Published in: IEEE Transactions on Robotics, 2015
Number of citations: 5,819
Summary: This paper presents ORB-SLAM, a feature-based monocular simultaneous localization and mapping (SLAM) system that operates in real time, in small and large indoor and outdoor environments. The system is robust to severe motion clutter, allows wide baseline loop closing and relocalization, and includes full automatic initialization. Building on excellent algorithms of recent years, we designed from scratch a novel system that uses the same features for all SLAM tasks: tracking, mapping, relocalization, and loop closing. A survival of the fittest strategy that selects the points and keyframes of the reconstruction leads to excellent robustness and generates a compact and trackable map that only grows if the scene content changes, allowing lifelong operation. We present an exhaustive evaluation in 27 sequences from the most popular datasets. ORB-SLAM achieves unprecedented performance with respect to other…
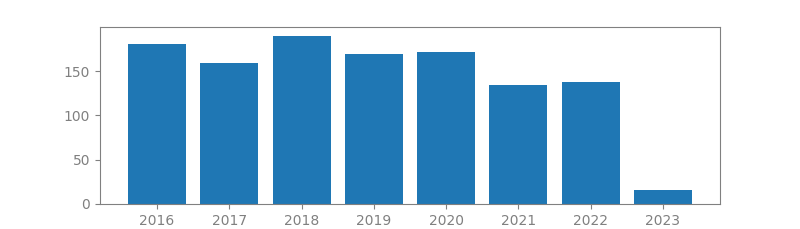
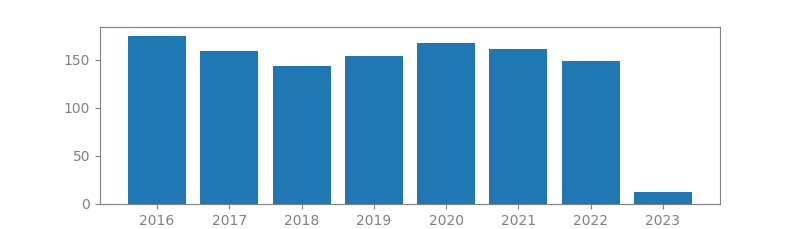
7. SIMULTANEOUS LOCALIZATION AND MAPPING: PART I
Authors: Hugh Durrant-Whyte, Tim Bailey
Published in: IEEE robotics & automation magazine, 2006
Number of citations: 5,649
Summary: This paper describes the simultaneous localization and mapping (SLAM) problem and the essential methods for solving the SLAM problem and summarizes key implementations and demonstrations of the method. While there are still many practical issues to overcome, especially in more complex outdoor environments, the general SLAM method is now a well understood and established part of robotics. Another part of the tutorial summarized more recent works in addressing some of the remaining issues in SLAM, including computation, feature representation, and data association.
8. MONOSLAM: REAL-TIME SINGLE CAMERA SLAM
Authors: Andrew J Davison, Ian D Reid, Nicholas D Molton, Olivier Stasse
Published in: IEEE transactions on pattern analysis and machine intelligence, 2007
Number of citations: 4,689
Summary: We present a real-time algorithm which can recover the 3D trajectory of a monocular camera, moving rapidly through a previously unknown scene. Our system, which we dub MonoSLAM, is the first successful application of the SLAM methodology from mobile robotics to the “pure vision” domain of a single uncontrolled camera, achieving real time but drift-free performance inaccessible to structure from motion approaches. The core of the approach is the online creation of a sparse but persistent map of natural landmarks within a probabilistic framework. Our key novel contributions include an active approach to mapping and measurement, the use of a general motion model for smooth camera movement, and solutions for monocular feature initialization and feature orientation estimation. Together, these add up to an extremely efficient and robust algorithm which runs at 30 Hz with standard PC and camera hardware…
9. A TUTORIAL ON VISUAL SERVO CONTROL
Authors: Seth Hutchinson, Gregory D Hager, Peter I Corke
Published in: IEEE transactions on robotics and automation, 1996
Number of citations: 4,559
Summary: This article provides a tutorial introduction to visual servo control of robotic manipulators. Since the topic spans many disciplines our goal is limited to providing a basic conceptual framework. We begin by reviewing the prerequisite topics from robotics and computer vision, including a brief review of coordinate transformations, velocity representation, and a description of the geometric aspects of the image formation process. We then present a taxonomy of visual servo control systems. The two major classes of systems, position-based and image-based systems, are then discussed in detail. Since any visual servo system must be capable of tracking image features in a sequence of images, we also include an overview of feature-based and correlation-based methods for tracking. We conclude the tutorial with a number of observations on the current directions of the research field of visual servo control.
10. ORB-SLAM2: AN OPEN-SOURCE SLAM SYSTEM FOR MONOCULAR, STEREO AND RGB-D CAMERAS
Authors: Raul Mur-Artal, Juan D Tardos
Published in: IEEE Transactions on Robotics, 2017
Number of citations: 4,553
Summary: We present ORB-SLAM2, a complete simultaneous localization and mapping (SLAM) system for monocular, stereo and RGB-D cameras, including map reuse, loop closing, and relocalization capabilities. The system works in real time on standard central processing units in a wide variety of environments from small hand-held indoors sequences, to drones flying in industrial environments and cars driving around a city. Our back-end, based on bundle adjustment with monocular and stereo observations, allows for accurate trajectory estimation with metric scale. Our system includes a lightweight localization mode that leverages visual odometry tracks for unmapped regions and matches with map points that allow for zero-drift localization. The evaluation on 29 popular public sequences shows that our method achieves state-of-the-art accuracy, being in most cases the most accurate SLAM solution. We publish the…
11. RANDOMIZED KINODYNAMIC PLANNING
Authors: Steven M LaValle, James J Kuffner Jr
Published in: The international journal of robotics research, 2001
Number of citations: 4,088
Summary: This paper presents the first randomized approach to kinodynamic planning (also known as trajectory planning or trajectory design). The task is to determine control inputs to drive a robot from an ini ial configuration and velocity to a goal configuration and velocity while obeying physically based dynamical models and avoiding obstacles in the robot’s environment. The authors consider generic systems that express the nonlinear dynamics of a robot in terms of the robot’s high-dimensional configuration space. Kinodynamic planning is treated as a motion-planning problem in a higher dimensional state space that has both first-order differential constraints and obstacle-based global constraints. The state space serves the same role as the configuration space for basic path planning; however, standard randomized path-planning…
12. SAMPLING-BASED ALGORITHMS FOR OPTIMAL MOTION PLANNING
Authors: Sertac Karaman, Emilio Frazzoli
Published in: The international journal of robotics research, 2011
Number of citations: 4,052
Summary: During the last decade, sampling-based path planning algorithms, such as probabilistic roadmaps (PRM) and rapidly exploring random trees (RRT), have been shown to work well in practice and possess theoretical guarantees such as probabilistic completeness. However, little effort has been devoted to the formal analysis of the quality of the solution returned by such algorithms, e.g. as a function of the number of samples. The purpose of this paper is to fill this gap, by rigorously analyzing the asymptotic behavior of the cost of the solution returned by stochastic sampling-based algorithms as the number of samples increases. A number of negative results are provided, characterizing existing algorithms, e.g. showing that, under mild technical conditions, the cost of the solution returned by broadly used sampling-based algorithms converges almost surely to a non-optimal value. The main contribution of the paper is…
13. BEHAVIOR-BASED FORMATION CONTROL FOR MULTIROBOT TEAMS
Authors: Tucker Balch, Ronald C Arkin
Published in: IEEE transactions on robotics and automation, 1998
Number of citations: 3,884
Summary: New reactive behaviors that implement formations in multirobot teams are presented and evaluated. The formation behaviors are integrated with other navigational behaviors to enable a robotic team to reach navigational goals, avoid hazards and simultaneously remain in formation. The behaviors are implemented in simulation, on robots in the laboratory and aboard DARPA’s HMMWV-based unmanned ground vehicles. The technique has been integrated with the autonomous robot architecture (AuRA) and the UGV Demo II architecture. The results demonstrate the value of various types of formations in autonomous, human-led and communications-restricted applications, and their appropriateness in different types of task environments.
14. RRT-CONNECT: AN EFFICIENT APPROACH TO SINGLE-QUERY PATH PLANNING
Authors: James J Kuffner, Steven M LaValle
Published in: Robotics and Automation, 2000. Proceedings. ICRA'00. IEEE International Conference on, 2000
Number of citations: 3,780
Summary: Deeper neural networks are more difficult to train. We present a residual learning framework to ease the training of networks that are substantially deeper than those used previously. We explicitly reformulate the layers as learning residual functions with reference to the layer inputs, instead of learning unreferenced functions. We provide comprehensive empirical evidence showing that these residual networks are easier to optimize, and can gain accuracy from considerably increased depth. On the ImageNet dataset we evaluate residual nets with a depth of up to 152 layers - 8× deeper than VGG nets [40] but still having lower complexity. An ensemble of these residual nets achieves 3.57% error on the ImageNet test set. This result won the 1st place on the ILSVRC 2015 classification task. We also present analysis on CIFAR-10 with 100 and 1000 layers. The depth of representations is of central importance for many…
15. A SURVEY OF ROBOT LEARNING FROM DEMONSTRATION
Authors: Brenna D Argall, Sonia Chernova, Manuela Veloso, Brett Browning
Published in: Robotics and autonomous systems, 2009
Number of citations: 3,772
Summary: We present a comprehensive survey of robot Learning from Demonstration (LfD), a technique that develops policies from example state to action mappings. We introduce the LfD design choices in terms of demonstrator, problem space, policy derivation and performance, and contribute the foundations for a structure in which to categorize LfD research. Specifically, we analyze and categorize the multiple ways in which examples are gathered, ranging from teleoperation to imitation, as well as the various techniques for policy derivation, including matching functions, dynamics models and plans. To conclude we discuss LfD limitations and related promising areas for future research.
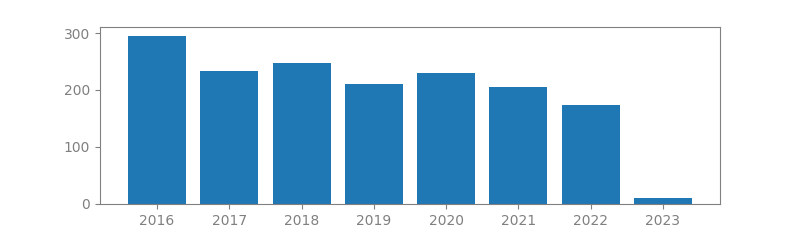
16. A SOLUTION TO THE SIMULTANEOUS LOCALIZATION AND MAP BUILDING (SLAM) PROBLEM
Authors: MWM Gamini Dissanayake, Paul Newman, Steve Clark, Hugh F Durrant-Whyte, Michael Csorba
Published in: IEEE Transactions on robotics and automation, 2001
Number of citations: 3,763
Summary: The simultaneous localization and map building (SLAM) problem asks if it is possible for an autonomous vehicle to start in an unknown location in an unknown environment and then to incrementally build a map of this environment while simultaneously using this map to compute absolute vehicle location. Starting from estimation-theoretic foundations of this problem, the paper proves that a solution to the SLAM problem is indeed possible. The underlying structure of the SLAM problem is first elucidated. A proof that the estimated map converges monotonically to a relative map with zero uncertainty is then developed. It is then shown that the absolute accuracy of the map and the vehicle location reach a lower bound defined only by the initial vehicle uncertainty. Together, these results show that it is possible for an autonomous vehicle to start in an unknown location in an unknown environment and, using relative…
-problem.png)
17. A SURVEY OF SOCIALLY INTERACTIVE ROBOTS
Authors: Terrence Fong, Illah Nourbakhsh, Kerstin Dautenhahn
Published in: Robotics and autonomous systems, 2003
Number of citations: 3,656
Summary: This paper reviews “socially interactive robots”: robots for which social human-robot interaction is important. We begin by discussing the context for socially interactive robots, emphasizing the relationship to other research fields and the different forms of “social robots”. We then present a taxonomy of design methods and system components used to build socially interactive robots. Finally, we describe the impact of these robots on humans and discuss open issues. An expanded version of this paper, which contains a survey and taxonomy of current applications, is available as a technical report [T. Fong, I. Nourbakhsh, K. Dautenhahn, A survey of socially interactive robots: concepts, design and applications, Technical Report No. CMU-RI-TR-02-29, Robotics Institute, Carnegie Mellon University, 2002].
18. FASTSLAM: A FACTORED SOLUTION TO THE SIMULTANEOUS LOCALIZATION AND MAPPING PROBLEM
Authors: Michael Montemerlo, Sebastian Thrun, Daphne Koller, Ben Wegbreit
Published in: Aaai/iaai, 2002
Number of citations: 3,600
Summary: The ability to simultaneously localize a robot and accurately map its surroundings is considered by many to be a key prerequisite of truly autonomous robots. However, few approaches to this problem scale up to handle the very large number of landmarks present in real environments. Kalman filter-based algorithms, for example, require time quadratic in the number of landmarks to incorporate each sensor observation. This paper presents FastSLAM, an algorithm that recursively estimates the full posterior distribution over robot pose and landmark locations, yet scales logarithmically with the number of landmarks in the map. This algorithm is based on an exact factorization of the posterior into a product of conditional landmark distributions and a distribution over robot paths. The algorithm has been run successfully on as many as 50,000 landmarks, environments far beyond the reach of previous approaches. Experimental results demonstrate the advantages and limitations of the FastSLAM algorithm on both simulated and realworld data.
19. A UNIFIED APPROACH FOR MOTION AND FORCE CONTROL OF ROBOT MANIPULATORS: THE OPERATIONAL SPACE FORMULATION
Authors: Oussama Khatib
Published in: IEEE Journal on Robotics and Automation, 1987
Number of citations: 3,428
Summary: A framework for the analysis and control of manipulator systems with respect to the dynamic behavior of their end-effectors is developed. First, issues related to the description of end-effector tasks that involve constrained motion and active force control are discussed. The fundamentals of the operational space formulation are then presented, and the unified approach for motion and force control is developed. The extension of this formulation to redundant manipulator systems is also presented, constructing the end-effector equations of motion and describing their behavior with respect to joint forces. These results are used in the development of a new and systematic approach for dealing with the problems arising at kinematic singularities. At a singular configuration, the manipulator is treated as a mechanism that is redundant with respect to the motion of the end-effector in the subspace of operational space…
20. SPATIAL PLANNING: A CONFIGURATION SPACE APPROACH
Authors: Tomas Lozano-Perez
Published in: Autonomous robot vehicles, 1990
Number of citations: 3,331
Summary: This paper presents algorithms for computing constraints on the position of an object due to the presence of other objects. This problem arises in applications that require choosing how to arrange or how to move objects without collisions. The approach presented here is based on characterizing the position and orientation of an object as a single point in a configuration space, in which each coordinate represents a degree of freedom in the position or orientation of the object. The configurations forbidden to this object, due to the presence of other objects, can then be characterized as regions in the configuration space, called configuration space obstacles. The paper presents algorithms for computing these configuration space obstacles when the objects are polygons or polyhedra.